

Découvrez ce qu'il se cache derrière l'autonomie de nos robots
Découvrez ce qu'il se cache derrière l'autonomie de nos robots
Découvrez ce qu'il se cache derrière l'autonomie de nos robots
Comment fonctionne notre navigation autonome
Comment fonctionne notre navigation autonome
Comment fonctionne notre navigation autonome
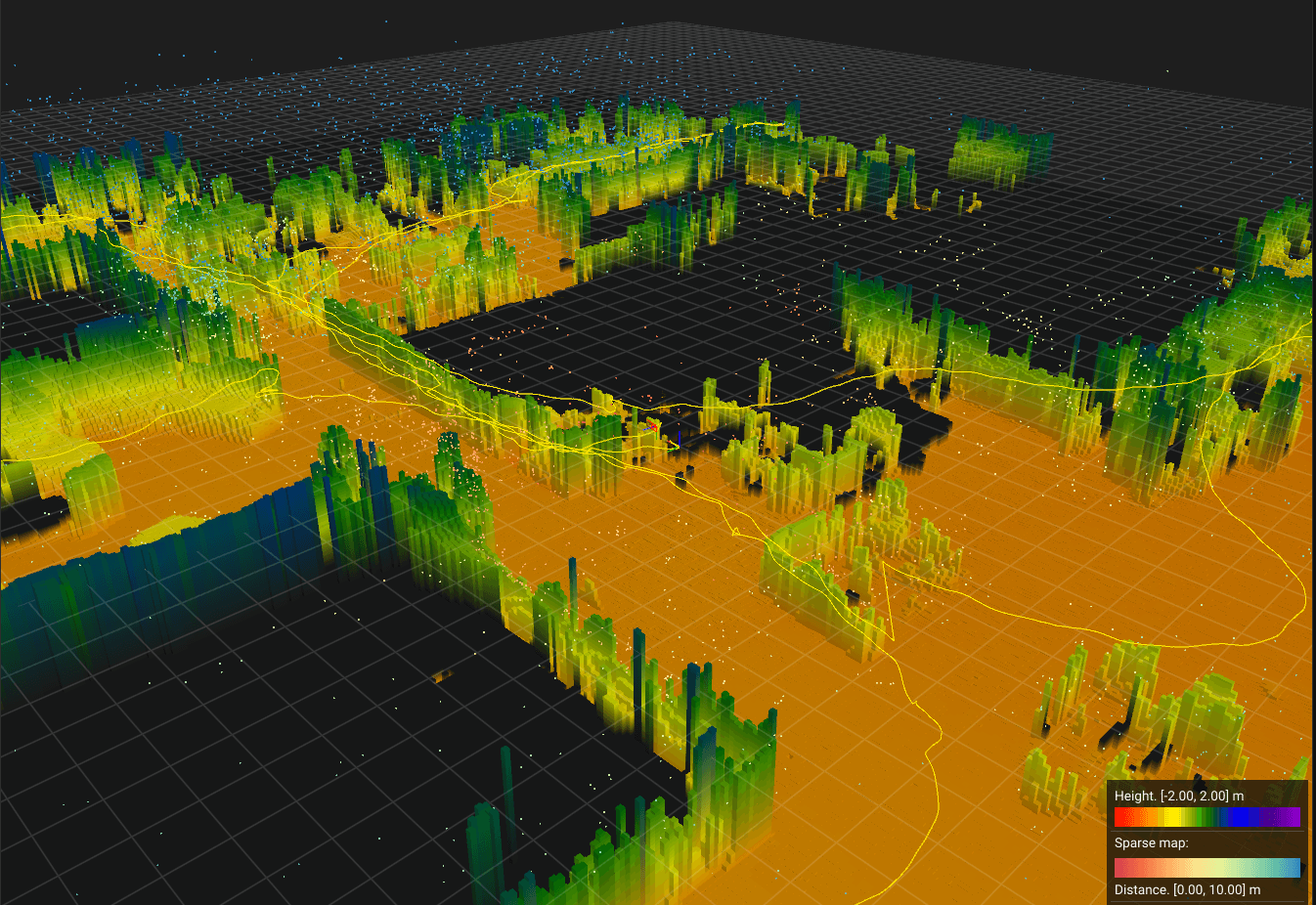
MAPPING ET LOCALISATION
Nos robots se déplacent dans une map 3D préalablement construite par nos ingénieurs.
Nos robots se déplacent dans une map 3D préalablement construite par nos ingénieurs.
Nos robots se déplacent dans une map 3D préalablement construite par nos ingénieurs.

NAVIGATION
Notre algorithme de navigation permet à nos robots de traiter de ses différents capteurs pour tracer le chemin le plus rapide et le plus sécurisé pour tous.
Notre algorithme de navigation permet à nos robots de traiter de ses différents capteurs pour tracer le chemin le plus rapide et le plus sécurisé pour tous.
Notre algorithme de navigation permet à nos robots de traiter de ses différents capteurs pour tracer le chemin le plus rapide et le plus sécurisé pour tous.
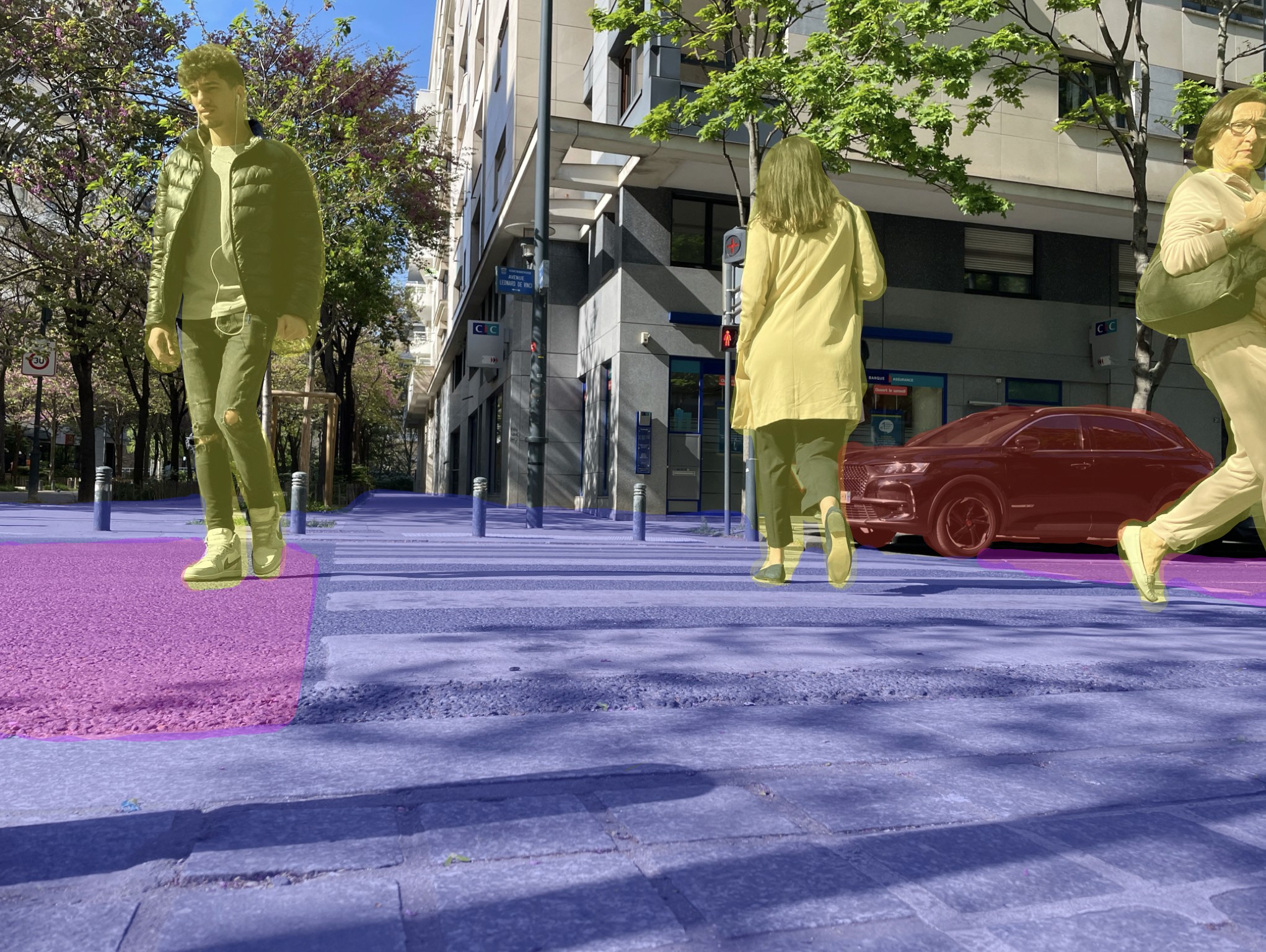
PERCEPTION
Alfred ne voit pas seulement les objects, ils les identifient. Il est capable de categoriser les piétons des voitures en temps réel.
Alfred ne voit pas seulement les objects, ils les identifient. Il est capable de categoriser les piétons des voitures en temps réel.
Alfred ne voit pas seulement les objects, ils les identifient. Il est capable de categoriser les piétons des voitures en temps réel.
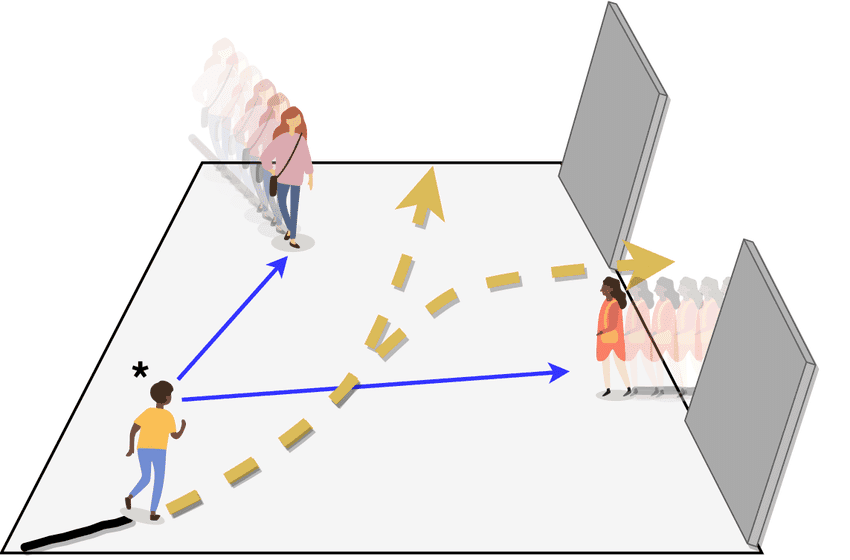
PREDICTION
L'algorithme de prédiction utilise du machine learning pour anticiper les actions des piétons.
L'algorithme de prédiction utilise du machine learning pour anticiper les actions des piétons.
L'algorithme de prédiction utilise du machine learning pour anticiper les actions des piétons.
MAPPING ET LOCALISATION
En utilisant une technologie de localisation précise à moins de 2cm près, nos robots se repèrent dans une map 3D préalablement construite. Couplé à un GNSS et un IMU, nos robots possèdent un localisation et une sécurité sans faille.
NAVIGATION
Notre navigation autonome repose sur des capteurs de pointe et des algorithmes sophistiqués. Nos robots cartographient en temps réel leur environnement, évitent les obstacles et planifient des trajectoires optimales, offrant une navigation autonome sans faille.

PERCEPTION
En exploitant une variété d'algorithmes de Deep Learning et en tirant parti des données de nos capteurs, notamment les caméras et le Lidar, nous sommes en mesure de détecter et d'identifier de manière précise tous les objets de l'environnement.
PREDICTION
Selon les données collectées sur la situation actuelle, nos prédisent le mouvement des objets environnants. Ensuite, en prenant en compte ces prédictions, un plan sans collision et conforme à la loi est généré.